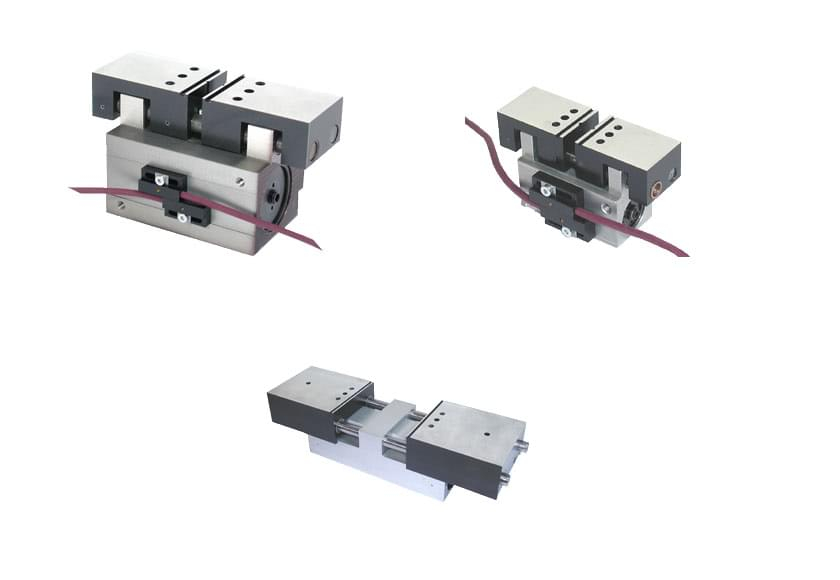
PTM pneumatic parallel gripper serie PSMU
PTM-Parallel Grippers are based on the rack-and-pinion principle like our rotating actuators. This fact allows for a compact design with small dimensions and low weight while still offering a high grip force.
The rack and pinion design produces an even clamping force over the whole range. The clamping jaws are absolutly centered in each position. Shortest clamping times are possible.
Each base jaw is connected tightly with one rack. This creates the great advantage that the jaws are firmly guided over the whole length of the gripper.
This long jaw guidance guarantees close tolerance, high precision and long life.
It is possible to work with very long clamping fingers without any problems. These advantages are enhanced in the alternative –PSMU the PTM-Parallel Gripper with u-shaped jaws.
Another option is the use of a spring in our Parallel Grippers, model ZFS, to secure the grip force during air pressure failure. With this it is possible to work only with one air connection.
Our Multi Position Cylinders -ZMZ- offer as many as two additional stops or additional strokes, which is very important in case of space restrictions.
The „Attachment for centring“ guarantees an exact exchange or a quick change position of the Parallel Gripper.